LIVE SYSTEM
Toolchain v1.0
AD WORLD
全栈工具宇宙。
面向 L4 级商用车自动驾驶的完整工具链解决方案。覆盖数据采集、传感器标定、可视化调试全流程,助力矿卡、重卡、AGV 等场景快速落地。
CAPTURE: ROS1/2 ASYNC
CALIB: 4-STEP PRECISE
STUDIO: IMGUI NATIVE

ADcapture
多传感器时间软同步数采
ADcalib
C2C · L2L · L2C · L2G 四步标定
ADstudio
高性能可视化回放调试桌面Product Matrix
三核驱动,覆盖全周期量产数据链
ADcapture v1.0


ADcapture
支持 ROS1/ROS2 的多传感器数据采集工具,可同步多雷达、多相机、组合导航等设备的时间戳,确保数据一致性。专为自动驾驶研发场景设计。
注入端协议ROS1 / ROS2 双向异步
对齐核心Tick 裁决时钟
最大落盘吞吐> 2.4 GB/s
工作区控制YAML 动态调参
ADcalib Suite


ADcalib
完整的传感器标定方案,通过 C2C → L2L → L2C → L2G 四个步骤实现 L4 级自动驾驶系统的精确标定,覆盖相机、雷达、导航系统之间的空间关系。
ROS运行环境0 依赖 (完全独立)
核心图算法FrameGraph 拓扑
标定矩阵控制平移旋转极细增量
四步标定流程C2C · L2L · L2C · L2G
ADstudio IDE
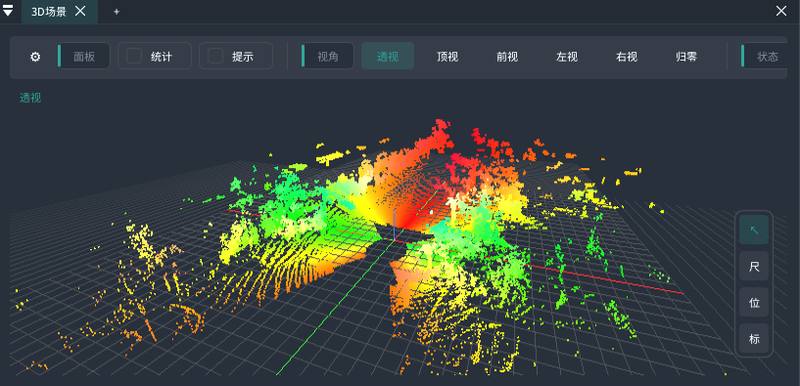

ADstudio
结合 RViz 和 PlotJuggler 功能的下一代可视化调试平台。基于 ImGui + SDL2 原生渲染,性能极高。配套插件系统支持第三方扩展。
重放流机制MCAP / DB3 混合
3D 视区渲染Scene3D 实时跟焦
分栏自由度无级拖拽组合
渲染引擎ImGui + SDL2 原生
Pipeline Flow
高密全栈数据闭环架构
01
设备接入配置
锁定相机与雷达额定输入频段
02
高吞吐收包
实车大文件并行写盘
03
空间外参对齐
动态微调旋转平移矩阵
04
离线多维重放
毫秒级 MCAP 加载回放
05
闭环交叉溯源
点云波形无损对齐缺陷
System Screenshots Corridor
核心软件真机视窗长廊
自动轮播中 · 点击左右箭头切换





Application Scenarios
覆盖多种商用车自动驾驶应用
矿区矿卡
露天矿区无人运输,支持 24 小时连续作业,已在多个矿区商业化落地。
干线重卡
高速公路 L4 级自动驾驶,支持编队行驶、自动变道等高级功能调试。
AGV / 偏码车
厂区、港口等封闭场景的自动导引车,支持多种导航方式调试。
叉车 / 小型车辆
仓储物流场景的小型自动驾驶车辆,轻量化部署,快速迭代调试。